Conventional robots move from A to B along predefined trajectories. Difficulties arise if, for example, a part is not positioned exactly where the robot expects it to be. In the worst case scenario, the robot cannot grasp the part and the application fails.
If the robot is equipped with cameras and image processing and/or 3D cameras, the situation can be improved in some cases. However, robust automation often fails due to component variants, unsuitable surfaces (reflective or transparent objects) or varying lighting in the production environment.
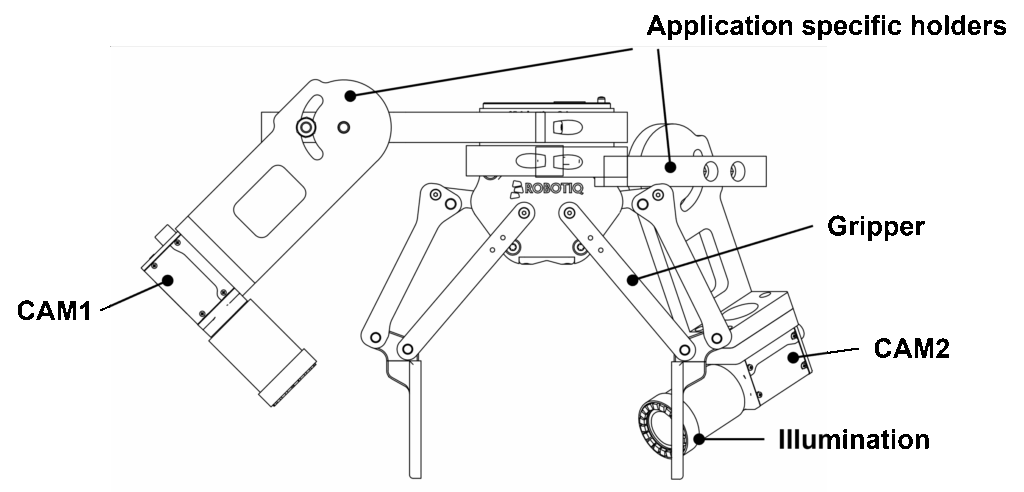
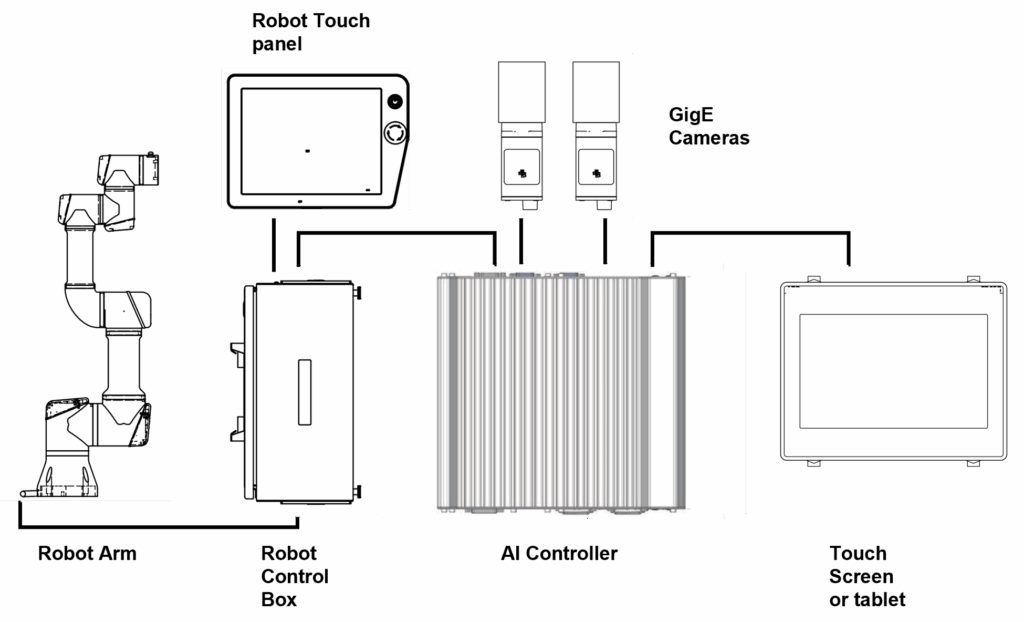
With CogniDrive, a controller is connected between the robot and the arm, and one or more cameras are mounted on the arm. This is followed by a training phase lasting a few minutes, during which the robot is instructed on how to grip the component. Environmental influences, component variants, etc. are also taken into account, i.e. trained. Factors such as the surface quality of the component, shape tolerances, varying ambient light, etc. no longer play a role at all because the robot learns how to deal with them. After the training phase, you receive a model of the trained process, which is stored in the controller and serves as the basis for the trained movements. Learned skills can be transferred to any number of robots without any effort.