Herkömmlilche Roboter bewegen sich entlang vordefinierter Trajektorien von A nach B. Schwierigkeiten entstehen wenn etwa ein Teil in Position nicht exakt da liegt, wo der Roboter es erwartet. Im schlimmsten Fall kann der Roboter im schlimmsten Fall dann das Teil nicht greifen und die Anwendung schlägt fehl.
Rüstet man den Roboter mit Kameras und Bildverabeitung oder/-und 3D-Kameras auf, so kann die Situation in einigen Fällen verbessert werden. Oft scheitert eine robuste Automatisierung jedoch an Bauteilvarianzen, ungeeigneten Oberflächen (spiegelnde oder transparente Objekte) oder variierender Beleuchtung in der Produktionsumgebung.
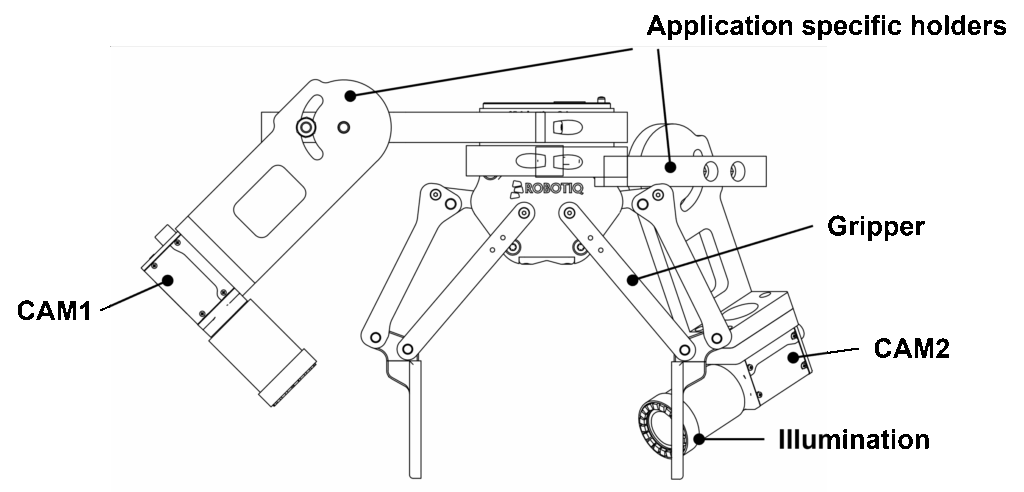
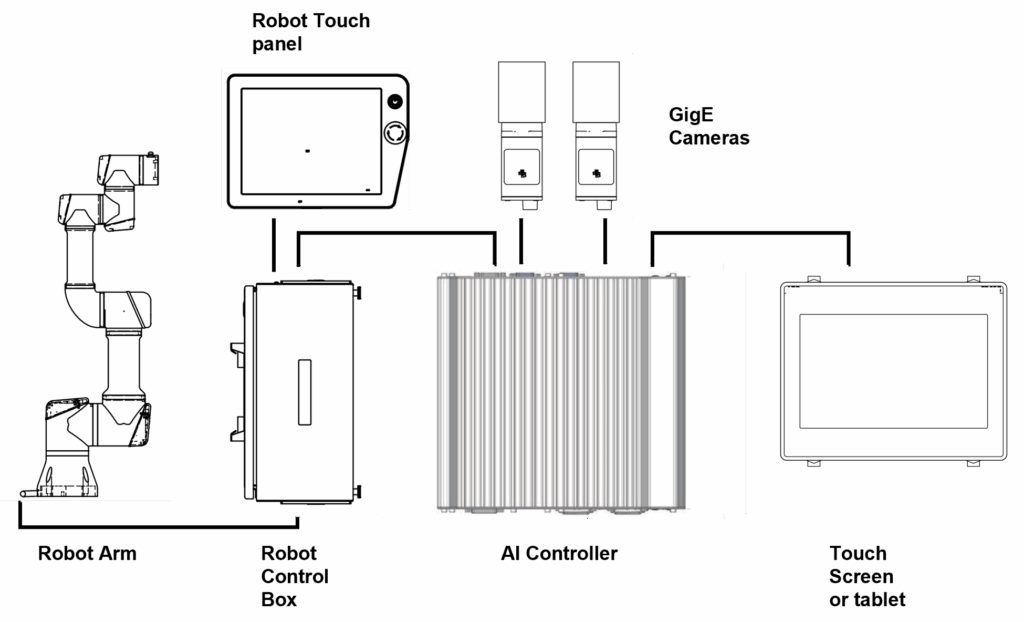
Bei CogniDrive wird zwischen Roboter und Arm ein Controller geschaltet, und es werden eine oder mehrere Kameras am Arm montiert. Es folgt eine wenige Minuten dauernde Trainingsphase, in der dem Roboter erklärt wird, wie er das Bauteil zu greifen hat. Dabei werden Umgebungseinflüsse, Bauteilvarianzen, etc. mit berücksichtigt. d.h. mit trainiert. Faktoren wie Oberflächenbeschaffenheit des Bauteils, Formtoleranzen, variierendes Umgebungslicht usw. spielen überhaupt keine Rolle mehr weil der Roboter lernt damit umzugehen. Nach der Trainingsphase erhalten Sie ein Modell des trainierten Vorgangs, das im Controller gespeichert wird und als Grundlage für die trainierten Bewegungen dient. Erlernte Fähigkeiten können auf beliebig viele Roboter ohne Aufwand übertragen werden.